








AUV在水下长期作业中存在一个重要瓶颈,就是能源供给问题,即充电问题;另外,在卫星信道带宽有限且有水下隐蔽航行要求的情况下,水下获取的大量数据的上传也是一个瓶颈。为此,我们研究采用移动式大型水下坞站来解决上述瓶颈。

01两大模式
AUV在水下分为两大模式
任务模式
任务模式主要是根据AUV的任务规划,利用传感器采集数据结合数据驱动、SLAM导航等关键技术,实现AUV水下高效率作业。
接驳模式
当AUV检测到自身电量较低不足以支撑后续任务,或者AUV业务数据需要上传时,AUV自动进入接驳模式。

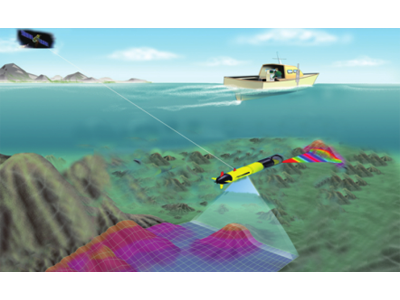
02三个阶段
AUV接驳模式主要分为三个阶段
AUV远端航行阶段
首先,第一阶段为AUV远端航行阶段,此时AUV在声学传感作用范围外,AUV利用搭载的姿态和速度传感器,进行组合导航。
归航阶段
第二阶段为归航阶段,AUV航行到声学传感范围内,利用搭载的声学传感设备,测量安装在水下坞站上的声学信标的方向,计算得到AUV与水下坞站间的距离以及坞站的位置。
终端归航阶段
第三阶段为终端归航阶段,当AUV进入水下坞站的视觉范围内,利用光学接驳引导进入坞站。
AUV自动接驳入坞全过程
整个过程中解决的关键技术问题包括:水下接驳环境模糊与不均匀条件下的光学传感问题和稳健数据关联的SLAM精确导航定位问题;AUV欠驱动和归航过程中不确定性横流干扰及实时避障条件下,基于虚拟域逆动力学与动态窗口法对接驳中姿轨进行同步在线优化;针对末端低速对接过程中出现的姿态控制不精确和舵力失效问题,采用基于ILOS和深度强化学习的混合接驳控制。






