








我国“十四五”规划提出,要在深地深海等前沿领域实施一批具有前瞻性、战略性的国家重大科技项目。深海探测、海洋资源开发利用等已成为新兴战略性领域,关注深海、聚焦深海资源的获取已上升为国家战略。
面积约2.517亿平方公里,占地球表面积49%的国际海底区域资源是全人类共同继承的财产。为了开辟我国新的资源来源、维护我国开发国际海底资源的权益,1990年“中国大洋矿产资源开发协会”成立,1991年3月5日我国被联合国海底筹委会登记为“深海采矿先驱投资者”,此后我国在国际海底先后获得五块探矿区,面积约23万平方公里。
深海海底资源开发涉及诸多领域,是一项庞大系统工程,深海矿物资源多处于3000~6000米的海底,海面和海底环境十分复杂,环境保护要求极为严苛,多数矿区距我国本土较远,缺乏必要的支撑条件,资源开发难度很大,需要分期分步逐渐推进,因此调查、勘探成为开采前最重要的基础性工程。
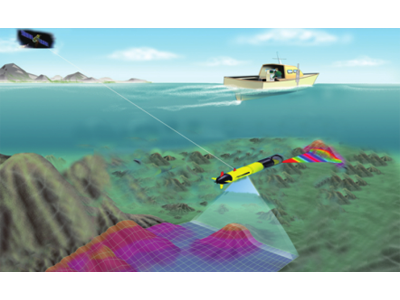
深海资源调查、勘探装备大致可以分为两类,第一类是通用常规调查设备,这类设备易于操作,成本相对低,在粗网格调查中十分有效,已成为我国科学调查船首选设备。第二类为大型复杂移动调查装备,主要指深海(本文定义1000米以下)机器人系统,包括:载人潜水器(HOV)、遥控水下机器人(ROV)、自主水下机器人(AUV)、深海拖曳机器人(DTS,简称深拖)四大类。这些各有特色和优势的装备功能互补与其它测量仪器如多波束、各种定位系统等组合成大洋资源高端调查与勘测系统。
自20世纪90年代以来,我国在国际海底区域矿产资源调查中自主水下机器人技术得到了长足的发展,良好的操纵性,较高的与复杂海底地形适配力,大范围的自主航行能力、不需要绑定母船,可控的高精度航迹,以及自适应自主管控能力,使其成为多金属结核、富钴结壳和热液硫化物调查的得力手段,在深海资源调查,海洋科学研究以及海洋工程等领域成为一类应用广泛的重要装备。自主机器人技术十分复杂且具泛在性和带动性,加速发展新一代的自主水下机器人,意义重大。
本文扼要阐述国外深海自主机器人现状,重点介绍我国深海自主机器人从无到有、从浅到深、迎难而上的发展历程,以具有代表性的“潜龙”系列自主水下机器人研发过程为例给出了面对的技术挑战,以及在大洋矿产资源调查中的应用情况和取得的部分成果,文末对未来发展前景提出若干设想和建议。
一、深海自主机器人国外研究现状
自主水下机器人是当今世界各国关注的热点,国内有许多学者对世界自主水下机器人的发展进行了评述。本文不拟详细叙述,仅作简单讨论。国外自主水下机器人研究已有近70年的历史。以美国为首的西方发达国家,如英国、法国、挪威、加拿大、德国、前苏联等先后投入重金研发了多种型号的深海机器人,并成功用于海洋资源调查、海底地质勘测、水下搜索等深海作业。
上个世纪50年代,美国华盛顿大学研制了世界上第一艘AUV—SPURV,1977年,法国建造了世界上第一艘潜深6000米的AUV“逆戟鲸”(Epaulard)号,“逆戟鲸”号曾在太平洋5400米深处进行多金属结核的调查,在后来的五年中,其水下航行超过805公里,拍下了20万张照片。1994年美国伍兹霍尔海洋研究所(WHOI)研发的ABE深海机器人,完成了其第一次科学考察,从1996年起,ABE完成了两百多次的下潜作业,此后一直用于深海热液考察。同一时期,英国Autosub、加拿大Theseus、俄罗斯MT-88都在深海科学研究、海洋资源调查中得到了应用。近年来,随着深海机器人技术的不断进步,一批深海机器人相继问世,如美国的Sentry深海机器人,英国的Autosub6000,挪威的HUGIN4500,日本的R2D4等,并出现了商业化的深海机器人,如金枪鱼机器人公司研制的Bluefin-21、Kongsberg公司生产的REMUS6000等,2011年REMUS6000成功搜寻到失事客机AF447的黑匣子,2017年搜寻到重型巡洋舰UUSIndianapolis的残骸;Bluefin-21参加了2014年马航MH370的搜寻工作,Sentry、Autosub6000、R2D4多次在大洋热液区、海底火山区执行科学考察任务。
表1 国外主要深海自主水下机器人


备注:Sentry(a),REMUS 6000(b),Autosub6000(c),r2D4(d)
图1 国外部分深海自主水下机器人
纵观全球AUV发展的历史,可以得出以下几点看法:
⑴美国在AUV上投入的力量最大,其AUV发展的历史具有代表性。
⑵AUV发展的历史虽然较长但曲曲折折,与人工智能发展的历史颇为相似,这是因为AUV对人工智能技术的依赖更强。当今,如火如荼的人工智能技术发展正推动AUV同步迈向新阶段。显然,智能化的新一代AUV应是我们关注的重点。
⑶AUV走出科学家的实验室实现商业化是一个漫长的过程,这反映了AUV的科学技术难度,至2015年国际上的AUV总数大约500台左右,仍有近一半是试验床(Test-Bed)。近些年来出现了一些商业化的AUV,如表1中4、5、6、7、8已在国际市场上获得认可,AUV正在走向成熟期。相比之下我国的AUV商业市场尚未形成。
⑷“OCEAN”国际会议是观察各类海洋机器人受关注度的窗口,“OCEAN”会议每年发表的AUV论文数量远远超过其他类型水下机器人。这表明AUV仍有许多前沿科技问题需要深入探讨。
二、中国深海机器人发展历程
⒈中国深海机器人发展概况
深海机器人分为有人系统和无人系统,包括五大类,如图2所示。

图2 深海机器人类别
我国的深海机器人研究始于20世纪90年代初,在30年间,我国先后成功开发了“CR-01”、“CR-02”以及“潜龙”系列自主水下机器人;“海斗”系列自主遥控水下机器人;“海龙”、“海马”、“海星”遥控水下机器人和拖曳式水下机器人;载人潜水器“蛟龙”、“深海勇士”和“奋斗者”号,这些高新技术装备,工作水深在4500米到11,000米之间,基本满足了我国深海科学研究和资源调查的需求。与国外同类装备相比,其技术水平大体相齐或领先。
我国深海机器人装备取得的成就与国家大力支持密切相关,在国家战略需求牵引下,集结了国内的优势力量,汇聚了众多国内顶级专家和青年精英,团结协作、协同攻关,只用了不到国外一半的时间使我国深海机器人进入了国际先进水平行列。以下以深海自主机器人为例简要介绍我国深海机器人的发展历程。
⒉深海自主机器人发展历程
潜深1000米以下的自主水下机器人简称为深海自主机器人。深海自主机器人研究是最早得到国家“863”计划支持的重大项目,此后又得到科技部和中国大洋协会的持续支持,其发展历程具有代表性,大体分作三个阶段:
第一阶段,自主探索起步
“八五”期间,在国家“863计划”的支持下,包括中国科学院沈阳自动化研究所(SIA)、中国船舶总公司第702研究所、上海交通大学、哈尔滨工程大学、中国科学院声学研究所等单位组成联合研制团队,由八位专家组成总体组,带领各自团队展开我国第一艘潜深1000米无人无缆水下机器人“探索者”号的研制工作,从设计、制造、总装、调试和海试全部由国内自主完成,当时国内还没有相应的配套产业链,所需众多材料、零件部件、仪器仪表、传感器等主要靠国内相关单位研制,少部分部件和材料从国外引进,研制工作于1994年完成,并于同年在我国海南岛进行了1000米深海试验,试验结果达到了预期目标,成为我国向深海机器人领域进军的开端,该项目的成功填补了我国在该领域的一项空白,使我国在该领域拥有了一席之地,成为日后开展国际合作的基础。
第二阶段,国际合作加速成长
从1992年起,沈阳自动化研究所牵头的联合研究团队与俄罗斯科学院远东分院海洋技术问题研究所(IMTP)合作,开始研制潜深6000米自主水下机器人,该项目得到国家“863”计划重大项目和国家外专局支持。中俄双方发挥了各自的技术优势,密切合作,进展顺利, 1995年“CR-01”在太平洋海域完成了海试,对多金属结核矿区进行了实际探查。1997年“CR-01”又一次参加大洋协会组织的太平洋考察,获得了我国保留区大量的科学数据,取得了大量第一手的资料。“CR-01”是我国第一台6000米级深海机器人,使我国一跃成为世界上少数拥有该项技术和设备的国家之一。
“CR-01”以太平洋洋底多金属结核丰度调查为应用目标,其最大工作水深6000米,最大航速2节,续航力10小时,搭载有避碰声呐,侧扫声呐,浅地层剖面仪、照相机、录像机等传感器设备,可进行水下摄像、照相、海底地势及剖面测量、水文物理测量等。在国家863计划的支持下,联合研究团队又开展了“CR-02”的研制及试验工作。“CR-02”在“CR-01”基础上改进和提高了垂直面的机动性,主要适用于用于深海富钴结壳调查和复杂地形下的海洋调查等。



备注:(a)“Explorer”AUV,(b)“CR-01”6000m AUV,(c)“CR-02”6000m AUV
图3 深海自主水下机器人(SIA)
第三阶段,自主创新发展
近十年来,在国家“863”计划、中国大洋协会和中科院战略先导专项的支持下,沈阳自动化所面向大洋资源调查和海洋科学研究,先后研制了“潜龙”系列和“探索”系列自主水下机器人,用于大洋多金属结核调查、热液区资源勘查,冷泉区科学调查和海洋科学研究。
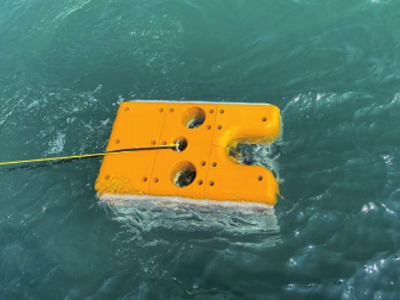
“潜龙”系列包括“潜龙一号”、“潜龙二号”、“潜龙三号”、“潜龙四号”,潜深4500米~6000米。“探索”系列自主水下机器人是面向海洋科学研究研制的系列自主水下机器人,潜深为100米~4500米。
表2 我国主要深海自主机器人

“潜龙一号”是中国大洋协会“十二五”项目支持研制的,它以大洋多金属结核资源调查为主要目标,自2013年起多次执行太平洋多金属结核调查任务,2016年对“潜龙一号”的导航定位、声学探测、光学探测以及操作使用等方面进行了升级,现已交付海洋调查船使用,为完成中国大洋协会与国际海底管理局签订的多金属结核勘探合同提供装备支撑。

图4“潜龙一号”和“潜龙四号”6000米自主水下机器人
“潜龙二号”是国家863计划支持研制的,主要用于大洋多金属硫化物调查作业,“潜龙二号”为了适应深海热液区复杂地形作业的需要采用了非回转体立扁型外形,配有可旋转推进器和可旋转舵的推进布局,使其具有良好的垂直面机动性和航行稳定性。“潜龙二号”也是我国首台获得中国船级社(CCS)入级证书的水下机器人。2017年起,在国家重点研发计划的支持下,沈阳自动化所对“潜龙二号”进行了技术升级,在续航力、超短基线定位、探测载荷搭载等方面有较大的提升,同时具备了自动采集水样的能力。

图5“潜龙二号”和“潜龙三号”4500米自主水下机器人
“潜龙三号”是中国大洋协会支持研制的,以完成大洋多金属硫化物矿区的资源调查为主要目标,“潜龙三号”是在“潜龙二号”基础上的改进型,在可靠性、稳定性和探测效率方面都有较大的提升,适用于深海热液区复杂地形作业。2018年5月完成海试及试验性应用。2019年起“潜龙三号”在南大西洋、西南印度洋开展科考应用,为该区域的海底热液活动及生态环境综合调查提供了依据。
“潜龙四号”是中国大洋协会采购的产品化6000米深海自主水下机器人,其主要技术指标同“潜龙一号”。2020年“潜龙四号”首次执行大洋调查任务,并顺利交付用户。自2013年起,“潜龙”系列深海自主水下机器人开展了十余次大洋科考,足迹遍及太平洋、印度洋和大西洋,其在大洋多金属结核区和多金属硫化物区的成功应用,支撑中国履行与联合国国际海底管理局的深海资源勘查合同,标志着我国深海自主水下机器人步入实用化、常态化应用阶段。

图6 “探索4500”自主水下机器人
“探索4500”是中国科学院战略性先导科技专项(A类)支持研制的4500米级深海自主水下机器人,它采用立扁形设计,主要用于深海热液、冷泉区复杂环境和生态系统的调查研究。2017年“探索4500”在南海冷泉区进行了海试与示范应用,获得冷泉区精细地形地貌图,冷泉区近底影像照片和理化环境多参数探测数据,实现AUV和ROV的跨区域同时作业。
2019年4月“探索4500”自主水下机器人与“海马”ROV在南海北部陆坡西北海域开展联合调查,获得大量水体观测数据和高清海底照片,拍摄到具有“冷泉”特征的海底生物。为发现新的海底大型活动性“冷泉”,查明其分布范围、生物群落及流体活动等奠定坚实基础。
小结:
⑴“潜龙”、“探索”系列自主水下机器人是完全依靠国内力量自主完成的高端实用化科技装备,其主要性能指标与国际同类机器人水准基本相齐。
⑵“潜龙”、“探索”系列的研制成功表明我国已经完全掌握了深海机器人的关键技术和核心技术,包括总体技术,线形设计,耐压材料及结构设计,高水压密封技术,操纵性研究,能源动力与推进,自动驾驶与航行控制,计算机软件与硬件,电子电器,导航、定位及通讯,故障诊断与应急处理,传感及探测载荷等,国内相关配套另部件和材料供给能力日臻完善。
⑶各种支撑条件,大型和关键实验室测试装备,试验场地、测试评价环境等基本健全。
⑷我国已经形成了一支专业齐全、经验丰富、老中青结合的人才队伍。
三、深海自主机器人在大洋矿产
资源调查中的应用
国际海底蕴藏着丰富的矿物资源,20世纪50年代末开始,美、日、英、法、西德和前苏联等发达国家,在中、东太平洋进行了大规模的勘探活动,并陆续圈定了多金属结核富矿区。中国大洋协会作为第五个深海采矿的先驱投资者,承担30万平方公里洋底的探测任务,并最终拥有对矿产资源最丰富的7.5万平方公里海域的优先开采权。
我国的深海机器人,研究始于20世纪90年代初,与中国大洋调查活动是同期进行的,深海自主机器人,最初的应用领域是大洋多金属结核调查和富钴结壳调查,从“十二五”开始,结合国际海底资源调查的新形势,扩展到热液硫化物、生物资源等的调查。
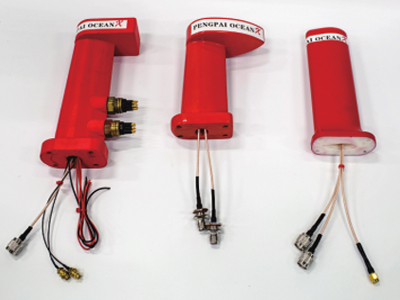
深海自主机器人,用于大洋矿产资源调查时,其搭载的探测传感器主要有:光学传感器、地形地貌探测传感器、水文调查传感器、磁探测传感器等。光学传感器包括水下照相机和水下摄像机,可获得水下照片和影像。地形地貌探测传感器包括测深侧扫声呐、浅地层剖面仪、多波束测深仪等,主要用于海底地形地貌测量。水文调查传感器包括温盐深(CTD)、浊度计、甲烷、二氧化碳、pH、溶解氧、氧化还原电位计等,主要用于海水物理和化学参数测量。磁探测传感器主要指磁力仪,用于探测地磁强度及磁异常。深海自主机器人,通过搭载上述传感器可开展深海多金属结核调查、热液硫化物调查、冷泉调查、深海生物资源调查等。
⒈深海自主机器人在多金属
结核调查中的应用
多金属结核又称锰结核,其主要分布在太平洋水深4000至6000米的海底,埋藏或半埋藏于海底沉积物中,多金属结核富含锰、铜、钴、镍等金属,由于其总量巨大,是最具规模性商业开发价值的海底战略矿产资源。围绕多金属结核调查,要求机器人具备自主海底地形地貌探测、浅地层地质结构探测、海底拍照/录像、海洋环境参数测量等能力,概括之为自主声学探测、光学探测和水文探测。
多金属结核分布区地形地貌相对平坦,地势起伏不大,偶有小型海底丘陵。这种地形对自主水下机器人的垂直机动能力要求不高,因此一般设计成鱼雷体流线型外形。“CR-01”、“潜龙”一号和“潜龙四号”都是按照此应用环境而设计的,“潜龙一号”是“CR-01”的改进和增强版,“潜龙四号”则属于“商业版”。通过搭载的测深侧扫声呐和照相机等探测传感器,获取海底地形数据、背散射数据、照片数据等多元综合数据,目的就是确定多金属结合的丰度,为未来开采选址提供基础数据。

图7 “CR-01”自主水下机器人航行轨迹图和拍摄的洋底锰结核
自主水下机器人在声学和光学调查时通常采用梳状搜索航线定高航行,以实现对海底区域全覆盖,通过自主水下机器人沿测线航行过程中获得的图像进行拼接,可以获得该区域的完整光学和声学图像。图7(a)为航行时的轨迹,图7(b)为“CR-01”和“潜龙一号”在多金属结核矿区拍摄的海底锰结核照片。
“CR-02”自主水下机器人是为适应深海海底富钴结壳调查而研制的深海机器人,钴结壳是一种分布于海底火山坡上的矿物资源,由于深海海山坡的地形复杂,对水下机器人的操纵控制、自治功能提出了较高的要求,“CR-02”自主水下机器人安装有8个避碰声呐,用于自主水下机器人的避碰。“CR-02”在特殊情况下可作为定点调查设备使用。作为定点调查设备使用时,通过长基线声学定位系统实时纠正其航迹与工作状态。图8为2001年8月“CR-02”对湖底模拟结核开采区进行实际观测的情况,观测区长200米、宽100米,“CR-02”自主水下机器人对该区域模拟结核铺撒前、后,及集矿机采集后的湖底分别进行了观测,以便为评价采集效果提供依据。图8(a)为“CR-02”自主水下机器人通过长基线定位系统获得的实际航迹,图8(b)为测深侧扫声呐获得的声图,这是模拟结核铺撒的分布情况及集矿机采矿时所留下的轨迹。图8(c)为照相机拍摄的模拟结核照片。

图8 “CR-02”在定点调查中应用
“潜龙一号”搭载有国产测深侧扫声呐、浅地层剖面仪、高清照相机及多种水文探测传感器,具有大范围声学调查和近海底光学调查两种工作模式。图9(a)为“潜龙一号”在大洋32航次中拍摄的海底锰结核照片,本航次中“潜龙一号”获得光学照片11579张。图9(b)为“潜龙一号”获得的海底测深图(局部)。

图9 “潜龙一号”拍摄的海底锰结核照片和获得的海底测深图
以上这些结果表明深海自主机器人与具有同样功能的深拖和其它手段相比,航行稳定,航迹精准,获得的调查图片稳定、清晰,获取的数据质量高,对于确定多金属结合的丰度和矿区的圈定发挥重要作用。
⒉深海自主机器人在热液硫化物/
冷泉调查中的应用
多金属硫化物(热液硫化物)是一种含有铜、锌、铅、金、银等多种元素的重要矿产资源,主要出现在2000~3000米深的大洋中脊和断裂活动带上。热液硫化物是海水侵入海底裂缝,受地壳深处热源加热,溶解地壳内的多种金属化合物,再从洋底喷出的烟雾状的喷发物冷凝而成的,深海热液俗称“黑烟囱”,其附近的温度高达400℃。热液硫化物是继大洋锰结核和结壳之后发现的又一具有巨大开发远景的海底矿产资源。
海底冷泉是一种海底的极端环境,来自海底沉积界面之下的流体以喷涌或渗漏方式从海底溢出,并产生系列物理、化学及生物作用。冷泉是探寻天然气水合物的重要标志之一,冷泉生态系统是研究地球深部生物圈的窗口。
热液硫化物区和冷泉区地势复杂,地势起伏较大,调查中要求自主水下机器人抵近海底或者喷口进行探测。当自主水下机器人进行近距离拍照时,需要自主水下机器人具有良好的机动性和更强的自主避障能力,实时识别海底地形起伏和前方障碍,根据障碍物复杂度和碰撞危险度进行决策,完成避障过程。
“CR-02”、“潜龙二号”、“潜龙三号”和“探索4500”均为大洋复杂海底资源勘察而设计的自主水下机器人,上述水下机器人在深海矿产资源调查中表现出极强的环境适应性:“CR-02”增加了垂直槽道推进器,加强了垂直面操控和机动能力;“潜龙二号”、“潜龙三号”和“探索4500”采用了立扁仿鱼型流线外形,并配置了4个可旋转推进器,结合全新的运动控制方法,使其具有良好的垂直面机动性和航行稳定性。此外,搭载了测深侧扫声呐、磁力计、甲烷、温盐仪、照相机、多参数水质仪等多种探测传感器,具备声学调查和近底光学调查两种工作模式,可在热液硫化物矿区获得高精度地形图、高清图像、磁力数据和多种水体物理和化学数据。
2015年12月到2016年3月,“潜龙二号”在西南印度洋进行首次海底资源调查,在西南印度洋热液矿区作业70余天,获得了热液区近海底精细三维地形地貌和磁力数据,获得洋中脊近海底高分辨率照片,同时发现热液区多处热液异常点,“潜龙二号”连续3年执行了我国西南印度洋多金属硫化物矿区的航次调查任务,为该海域海底矿区资源评估和矿区区域放弃提供了多元高精度数据。图10为“潜龙二号”获得的热液区海底硫化物及热液区测深图,图11为“探索4500”获得的冷泉区光学照片、海底轨迹和水体观测数据。

图10 “潜龙二号”在热液区拍摄到的海底硫化物和热液区测深图

图11 “探索4500”在冷泉区获得的光学照片和水体观测数据
“十三五”期间,在国家重点研发计划的支持下,对“潜龙二号”进行了技术升级,并开展科学应用。通过优化自主水下机器人性能和扩展功能,提高自主水下机器人的作业效率;设计了一套基于超短基线的组合导航算法,满足声学微地貌探测的拼图要求;通过对多源同步探测数据进行实时处理、自主分析,指导自主水下机器人自主采水样。
“潜龙”系列、“探索”系列自主水下机器人的研制及成功应用,使我国的深海自主水下机器人装备实现了国产化,为深海资源探测和海洋科学研究提供了重要的技术手段。
四、展望与建议
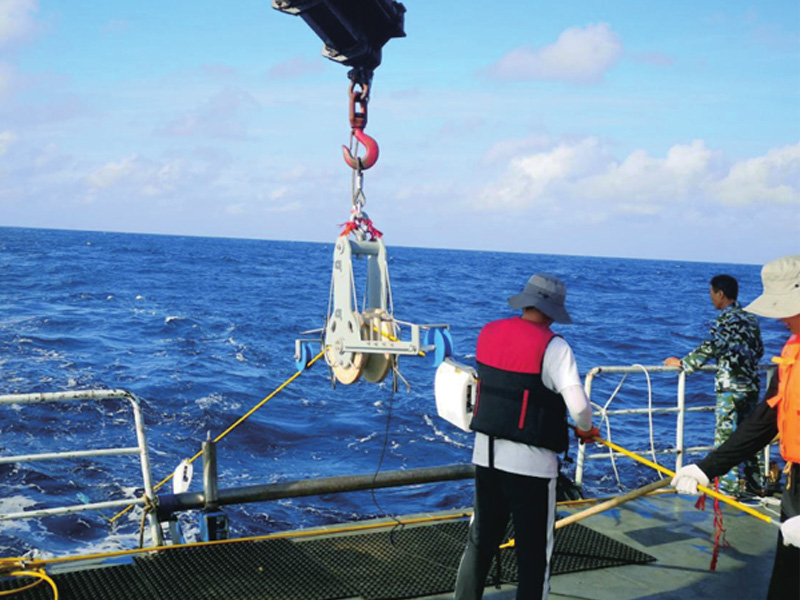
在过去30年间,我国的深海资源调查装备有了长足的进展,“大洋一号”船经过几次升级改造已经成为一艘装备完善先进的科学调查船,新的调查船正在扩充我国的远洋调查船队。科学调查船是海洋调查的海上研究基地。我国基于科学调查船的调查装备有了很大发展,新世纪以来,我国已有以“奋斗者”为代表的三型具有国际先进水平的载人潜水器先后投入服务,遥控型和自主型的深海机器人也取得了长足的进步。
我国深海调查装备可以分为三代,常规调查设备和深海水下机器人为第一代和第二代,深海资源调查与开发的战略需求和以人工智能、互联网技术为代表的信息电子技术的迅猛发展,正在推动深海装备迈向第三代。
展望未来,认识海洋,深入拓展海洋资源调查仍将是未来一、二十年的重点任务。调查工作全球化,面向三大洋、南北极及海斗深渊,适时向地内、地外海洋拓展;精细化,网格从千公里到百公里乃至公里级;调查装备智能化、无人化、网络化、立体化、规模化;调查数据专业和商业化是未来发展的总趋势。为此,
建议1:基于信息化、智能化、无人化建设第三代深海调查装备体系。以自主水下机器人信息化、智能化、无人化、网络化为切入点,全面推动深海装备向第三代转型。
建议2:现有深海调查装备的改进与提升。在现有装备的基础上努力改进和提升8种能力,自适应生存力、强大运载力、复杂使命执行力、智能决策力、自主管控力、协同力、信息化能力和重大科学平台支撑力。
建议3:在建议2的基础上努力实现单使命向多使命;简单任务向复杂任务;程序化向智能化;信息化向作业化;单平台向多平台;单一介质向跨介质的转化。
建议4:建设岸基指控和数据中心、无人化海洋科学调查船为海上中心,水面机器人为分中心,空中和水下机器人为基元的新型互通、互联、互补的深海调查装备体系。
五、结语
按照《联合国海洋法公约》,国际海底区域及其资源是人类的共同继承财产,但是没有先进技术手段就无法获取这部分资源,先进的技术和一流的装备,既是我国作为大国的形象必备,也是国际海底资源获取的先决条件,为了更多的获取国际海底资源,大力发展深海装备是一件功在当代利在千秋,造福子孙后代的伟大事业。
END
【作者简介】文/封锡盛 李一平 徐会希 李智刚,分别来自中国科学院沈阳自动化研究所机器人学国家重点实验室、中国科学院机器人与智能制造创新研究院和辽宁省水下机器人重点实验室。第一作者封锡盛,1941出生,出生于辽宁省海城市,1965年毕业于哈尔滨工业大学,现任中国科学院沈阳自动化研究所研究员,1999年当选为中国工程院院士;是我国最早从事水下机器人研究的专家之一,曾经担任我国第一台有缆遥控水下机器人“海人一号”电控系统负责人、我国第一台无缆自治水下机器人“探索者号”的总设计师、“CR-01”6000米自治水下机器人项目副总设计师、“CR-01”自治水下机器人工程化项目的总设计师和“CR-02”6000米自治水下机器人总设计师,主要负责总体设计、自主控制系统和信息处理系统等方面的工作;获省部级科技进步奖二等奖以上奖励10项,在国际会议上发表论文4篇,国内学术刊物论文14篇,与他人合作编著《机器人学导论》和《水下机器人》。通讯作者李一平,中科院沈阳自动化研究所水下机器人研究中心研究员,1988年毕业于中科院沈阳自动化研究所,获工学硕士学位,1999年被聘为硕士导师。多年来一直从事水下机器人控制系统的研究工作。本文为基金项目,国家重点研发计划(2017YFC0305901)。本文来自《中国有色金属学报》(2021年第9期),参考文献略,用于学习与交流,版权归作者及出版社共同拥有,作者介绍系本平台加载,转载也请备注由“溪流之海洋人生”微信公众平编辑与整理。

