








在无人潜航器(AUV)水下作业过程中,水下接驳技术是实现其能源补充、数据交互及长期驻留作业的关键环节,也是制约AUV从“单次作业”迈向“持续运维”的核心瓶颈。在能见度低、环境扰动强、定位信号缺失的水下环境中,如何实现AUV与接驳坞站的精准对接,一直是海洋工程领域公认的难题。
本期硬核技术盘点,澎湃海洋聚焦基于单目视觉引导的AUV水下接驳技术,推出一套可落地、高可靠、强适应的接驳解决方案,攻克水下精准对接“最后一米”的技术壁垒。
行业痛点:水下接驳面临的现实挑战
传统AUV接驳高度依赖人工操控与母船配合,不仅作业成本高、效率低,在复杂水域还存在安全风险。此外,水体对光线的强吸收与散射效应导致光学图像质量差,传统视觉方法难以可靠识别目标;接驳过程需在动态水流扰动下完成高精度位姿调整,对引导系统的实时性与稳健性要求极高;同时,接驳成功后如何确保AUV安全驶离,避免与坞站发生碰撞,也是工程应用中的关键安全命题。
技术破局:从引导到对接、出坞的全链路闭环
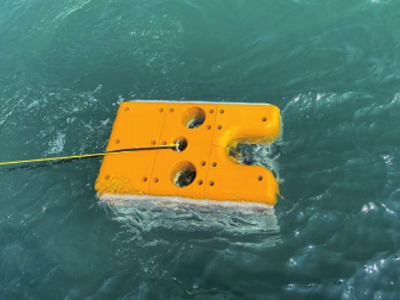
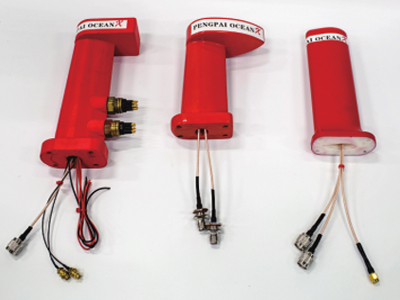
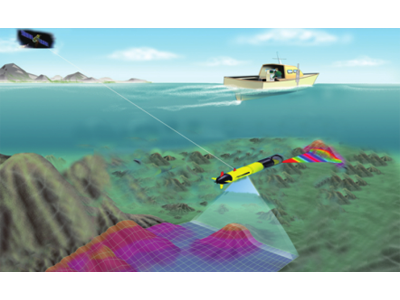
澎湃海洋技术团队采用“接驳坞站四光源信标导引+AUV单目光学相机视觉感知”协同策略,构建水下接驳视觉导引系统,与AUV规划、控制与推进系统深度耦合,实现从远端声引导到近距视觉精准引导入坞的全链路闭环控制。
为提升水下光学图像质量,视觉导引系统融合图像去噪、增强与分割等先进处理算法,有效增强导引光源的识别可靠性。在近距入坞第一阶段,系统根据引导光信标图像快速判定坞站方向,驱动AUV准确对准接驳口;当识别到有效光信标后,系统启动第二阶段,基于光信标布局实时解算AUV相对于坞站的距离及角度信息,并反馈至AUV控制系统,驱动AUV进行位姿微调,逐步逼近并完成精准入坞。
入坞后,AUV在坞站内完成能源补给与数据交互;出坞时系统创新引入基于引导灯的位姿估计策略,持续实时估算AUV与坞站的相对位置和姿态,引导AUV自主驶出,直至AUV与坞站达到预设安全距离后才驱动AUV进行姿态转换,有效避免出坞过程中的碰撞风险,确保作业全周期的安全可控。

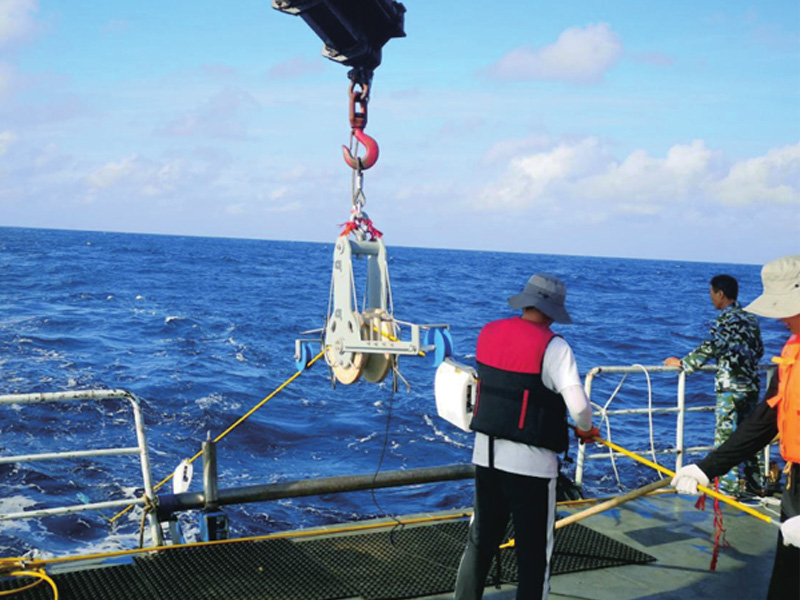
进展与成果展示

应用价值与未来展望
本技术的成功应用,标志着AUV从“单程探测”向“循环作业”模式的重要跨越,可广泛应用于海底观测网、水下数据中心、港口安防及智慧渔业等需长期驻留、高频次作业的场景,显著提升水下运维效率,降低作业成本。
未来,澎湃海洋技术团队将持续优化视觉导引算法的鲁棒性,探索声光融合引导、动态智能感知及多AUV集群协同接驳,推动水下接驳技术向更高精度、更强适应性演进,为海洋强国建设提供坚实的技术底座。
澎湃海洋|硬核技术盘点,未完待续
下期精彩,敬请期待

